Magnetic robots walk, crawl, and swim
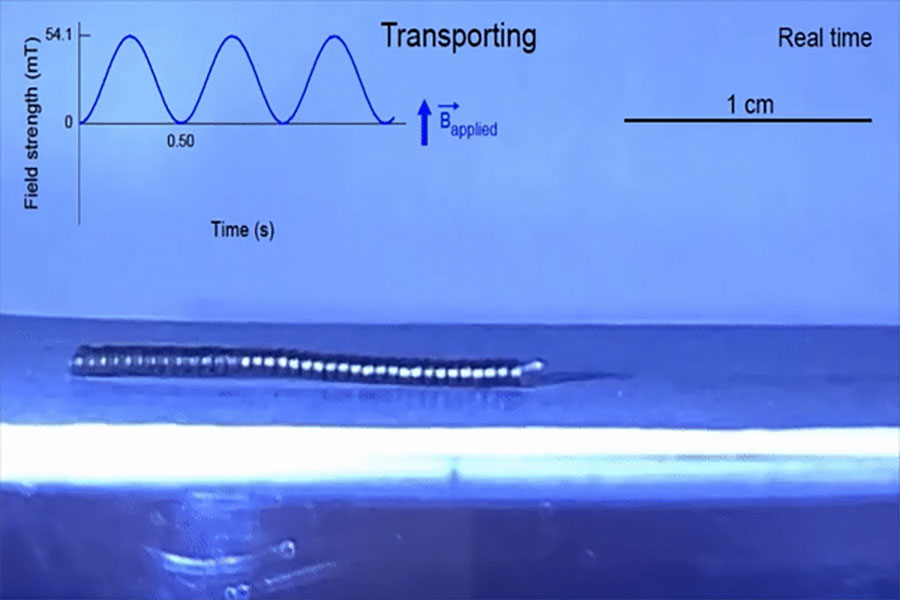
MIT scientists have developed tiny, soft-bodied robots that can be controlled with a weak magnet. The robots, formed from rubbery magnetic spirals, can be programmed to walk, crawl, swim — all in response to a simple, easy-to-apply magnetic field.
“This is the first time this has been done, to be able to control three-dimensional locomotion of robots with a one-dimensional magnetic field,” says Professor Polina Anikeeva, whose team published an open-access paper on the magnetic robots June 3 in the journal Advanced Materials. “And because they are predominantly composed of polymer and polymers are soft, you don’t need a very large magnetic field to activate them. It’s actually a really tiny magnetic field that drives these robots,” adds Anikeeva, who is a professor of materials science and engineering and brain and cognitive sciences at MIT, a McGovern Institute for Brain Research associate investigator, as well as the associate director of MIT’s Research Laboratory of Electronics and director of MIT’s K. Lisa Yang Brain-Body Center.
The new robots are well suited to transport cargo through confined spaces and their rubber bodies are gentle on fragile environments, opening the possibility that the technology could be developed for biomedical applications. Anikeeva and her team have made their robots millimeters long, but she says the same approach could be used to produce much smaller robots.
Polina Anikeeva
Matoula S. Salapatas Professor and Head, Department of Materials Science and EngineeringProfessor, Brain and Cognitive SciencesDirector, K. Lisa Yang Brain-Body CenterAssociate Investigator, McGovern Institute for Brain ResearchAssociate Director, Research Laboratory of Electronics
My goal is to combine the current knowledge of biology and nanoelectronics to develop materials and devices for minimally invasive treatments for neurological and neuromuscular diseases.